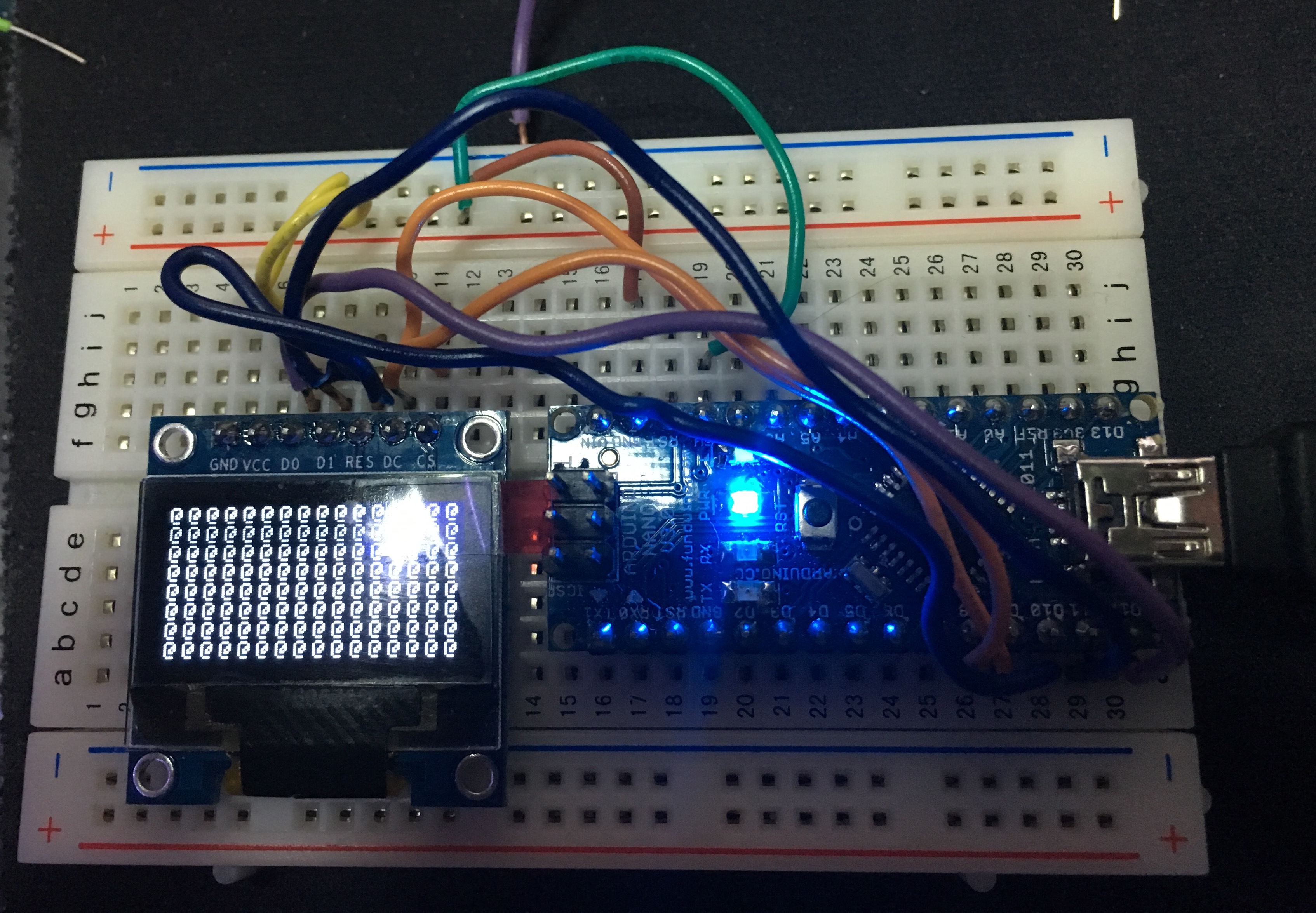
Das OLED Display, dass man überall verbauen kann. Es ist klein aber dennoch gut zu lesen. Diese Displays gibt es in den unterschiedlichsten Farben und Schnittstellen. Ich habe mit hier für die SPI Variante entschieden. Das Display U8G2_SSD1306_128X64 bekommt man bei eBay für einen schmalen Taler 🙂
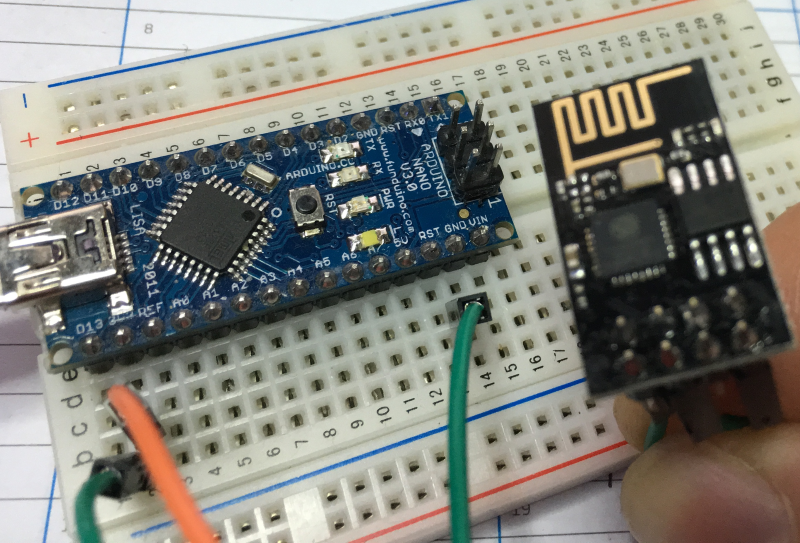
Anbei ein kleiner Test mit Hilfe des Arduino Nanos.
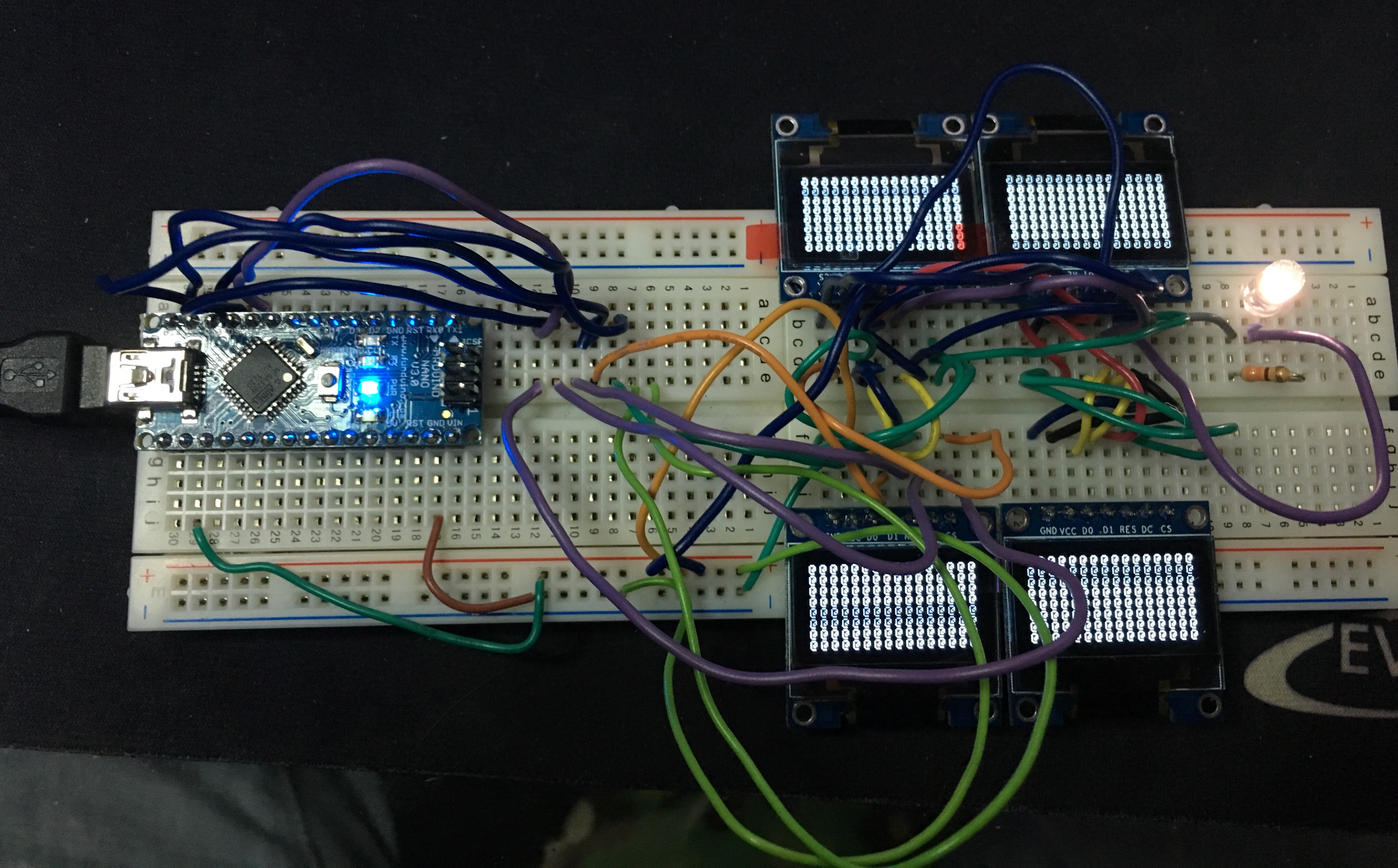
Da ich mehre Displays testen wollte, habe ich noch eine weiter Schaltung aufgebaut.
Und zu guter letzt der Programmcode, es empfiehlt sich die Bibliothek U8g2lib von github zu laden.
#include <Arduino.h>
#include <U8g2lib.h>
#include <SPI.h>
#include <Wire.h>
#include <SoftwareSerial.h>
//U8G2_SSD1306_128X64_NONAME_F_4W_SW_SPI(rotation, clock, data, cs, dc [, reset])
//U8G2_SSD1306_128X64_NONAME_F_4W_SW_SPI u8g2(U8G2_R0, 2, 3, 9, 8, 6);
U8G2_SSD1306_128X64_NONAME_F_4W_SW_SPI u8g2(U8G2_R0, 12, 11, 8, 9, 10);
// U8G2_SSD1306_128X64_NONAME_F_3W_SW_SPI u8g2(U8G2_R0, 3, 4, 7, 5);
const int irSense = A0; // Connect sensor to analog pin A0
int distance = 0;
typedef u8g2_uint_t u8g_uint_t;
#define SECONDS 10
uint8_t flip_color = 0;
uint8_t draw_color = 1;
void draw_set_screen(void) {
// graphic commands to redraw the complete screen should be placed here
u8g2.setColorIndex(flip_color);
u8g2.drawBox( 0, 0, u8g2.getWidth(), u8g2.getHeight() );
}
void draw_clip_test(void) {
u8g_uint_t i, j, k;
char buf[3] = "AB";
k = 0;
u8g2.setColorIndex(draw_color);
u8g2.setFont(u8g2_font_6x10_tf);
for( i = 0; i < 6; i++ ) {
for( j = 1; j < 8; j++ ) {
u8g2.drawHLine(i-3, k, j);
u8g2.drawHLine(i-3+10, k, j);
u8g2.drawVLine(k+20, i-3, j);
u8g2.drawVLine(k+20, i-3+10, j);
k++;
}
}
u8g2.setFontDirection(0);
u8g2.drawStr(0-3, 50, buf);
u8g2.setFontDirection(2);
u8g2.drawStr(0+3, 50, buf);
u8g2.setFontDirection(0);
u8g2.drawStr(u8g2.getWidth()-3, 40, buf);
u8g2.setFontDirection(2);
u8g2.drawStr(u8g2.getWidth()+3, 40, buf);
u8g2.setFontDirection(1);
u8g2.drawStr(u8g2.getWidth()-10, 0-3, buf);
u8g2.setFontDirection(3);
u8g2.drawStr(u8g2.getWidth()-10, 3, buf);
u8g2.setFontDirection(1);
u8g2.drawStr(u8g2.getWidth()-20, u8g2.getHeight()-3, buf);
u8g2.setFontDirection(3);
u8g2.drawStr(u8g2.getWidth()-20, u8g2.getHeight()+3, buf);
u8g2.setFontDirection(0);
}
void draw_char(void) {
char buf[2] = "@";
u8g_uint_t i, j;
// graphic commands to redraw the complete screen should be placed here
u8g2.setColorIndex(draw_color);
u8g2.setFont(u8g2_font_6x10_tf);
j = 8;
for(;;) {
i = 0;
for(;;) {
u8g2.drawStr( i, j, buf);
i += 8;
if ( i > u8g2.getWidth() )
break;
}
j += 8;
if ( j > u8g2.getHeight() )
break;
}
}
void draw_pixel(void) {
u8g_uint_t x, y, w2, h2;
u8g2.setColorIndex(draw_color);
w2 = u8g2.getWidth();
h2 = u8g2.getHeight();
w2 /= 2;
h2 /= 2;
for( y = 0; y < h2; y++ ) {
for( x = 0; x < w2; x++ ) {
if ( (x + y) & 1 ) {
u8g2.drawPixel(x,y);
u8g2.drawPixel(x,y+h2);
u8g2.drawPixel(x+w2,y);
u8g2.drawPixel(x+w2,y+h2);
}
}
}
}
// returns unadjusted FPS
uint16_t picture_loop_with_fps(void (*draw_fn)(void)) {
uint16_t FPS10 = 0;
uint32_t time;
time = millis() + SECONDS*1000;
// picture loop
do {
u8g2.firstPage();
do {
draw_fn();
} while( u8g2.nextPage() );
FPS10++;
flip_color = flip_color ^ 1;
} while( millis() < time );
return FPS10;
}
const char *convert_FPS(uint16_t fps) {
static char buf[6];
strcpy(buf, u8g2_u8toa( (uint8_t)(fps/10), 3));
buf[3] = '.';
buf[4] = (fps % 10) + '0';
buf[5] = '\0';
return buf;
}
void show_result(const char *s, uint16_t fps) {
// assign default color value
u8g2.setColorIndex(draw_color);
u8g2.setFont(u8g2_font_8x13B_tf);
u8g2.firstPage();
do {
u8g2.drawStr(0,12, s);
u8g2.drawStr(0,24, convert_FPS(fps));
} while( u8g2.nextPage() );
}
void setup(void) {
/* U8g2 Project: SSD1306 Test Board */
//pinMode(10, OUTPUT);
//pinMode(9, OUTPUT);
//digitalWrite(10, 0);
//digitalWrite(9, 0);
/* U8g2 Project: T6963 Test Board */
//pinMode(18, OUTPUT);
//digitalWrite(18, 1);
/* U8g2 Project: KS0108 Test Board */
//pinMode(16, OUTPUT);
//digitalWrite(16, 0);
/* U8g2 Project: LC7981 Test Board, connect RW to GND */
//pinMode(17, OUTPUT);
//digitalWrite(17, 0);
Serial.begin(9600);
u8g2.begin();
// flip screen, if required
// u8g2.setRot180();
// assign default color value
draw_color = 1; // pixel on
}
void loop(void) {
Serial.println("Hello");
uint16_t fps;
fps = picture_loop_with_fps(draw_clip_test);
show_result("draw clip test", fps);
delay(5000);
fps = picture_loop_with_fps(draw_set_screen);
show_result("clear screen", fps);
delay(5000);
fps = picture_loop_with_fps(draw_char);
show_result("draw @", fps);
delay(5000);
fps = picture_loop_with_fps(draw_pixel);
show_result("draw pixel", fps);
distance = analogRead(irSense); // Read the sensor
Serial.println(distance, DEC); // Display value in Serial Monitor window
delay(5000);
}